I am the CEO and co-founder of Gravis Robotics, a Swiss startup focused on deploying autonomous heavy machinery for construction. I received my doctorate from ETH Zurich, where I enabled robotic excavators to build large-scale structures from nonstandard stones and debris. My PhD research was developed within the Gramazio Kohler Chair for Architecture and Digital Manufacturing, and the Robotic Systems Lab. Previously, I taught as a lecturer at Princeton University, Rensselaer Polytechnic Institute, Vassar College, the Center for Architecture, Science and Ecology (CASE), and as an adjunct assistant professor at Columbia University GSAPP.
In the years before my PhD, I was also the principle of GREYSHED, a creative research practice focused on advanced workflows and robotics in architecture, engineering, construction, design and manufacturing.

PUBLICATIONS

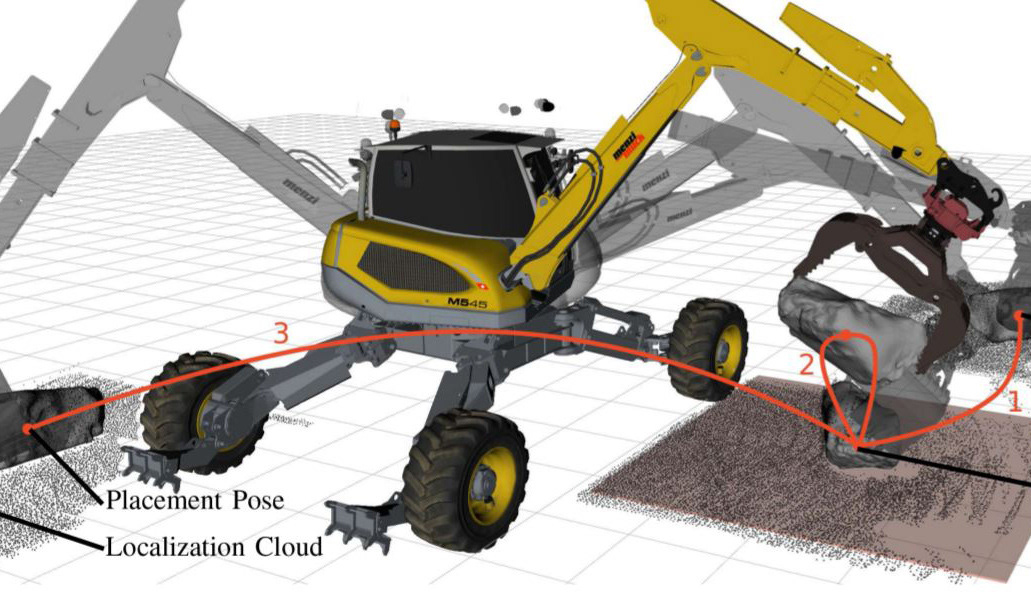
A framework for robotic excavation and dry stone construction using on-site materials
Ryan Luke Johns, Martin Wermelinger, Ruben Mascaro, Dominic Jud, Ilmar Hurkxkens, Lauren Vasey, Margarita Chli, Fabio Gramazio, Matthias Kohler, Marco Hutter
Science Robotics, 2023
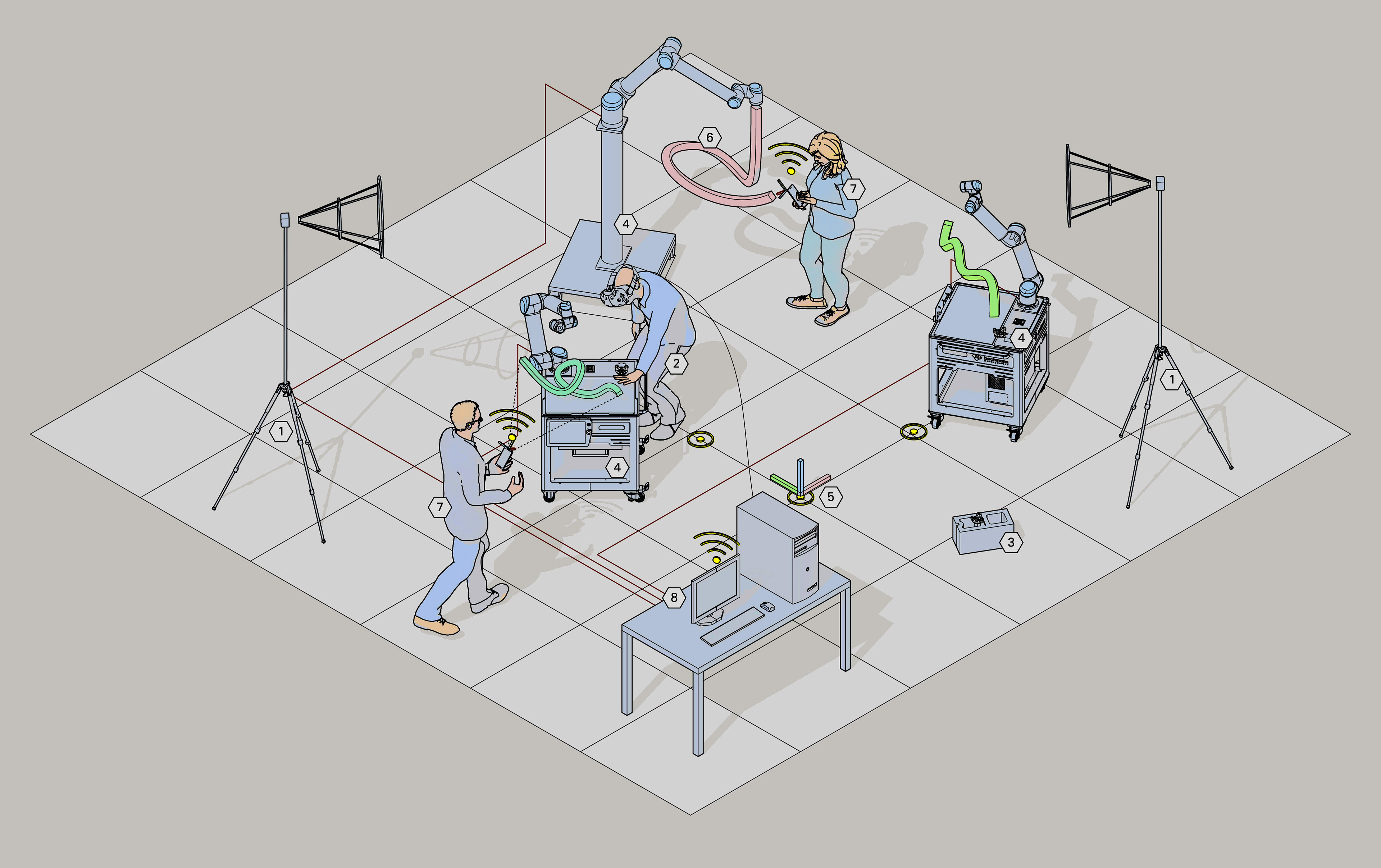
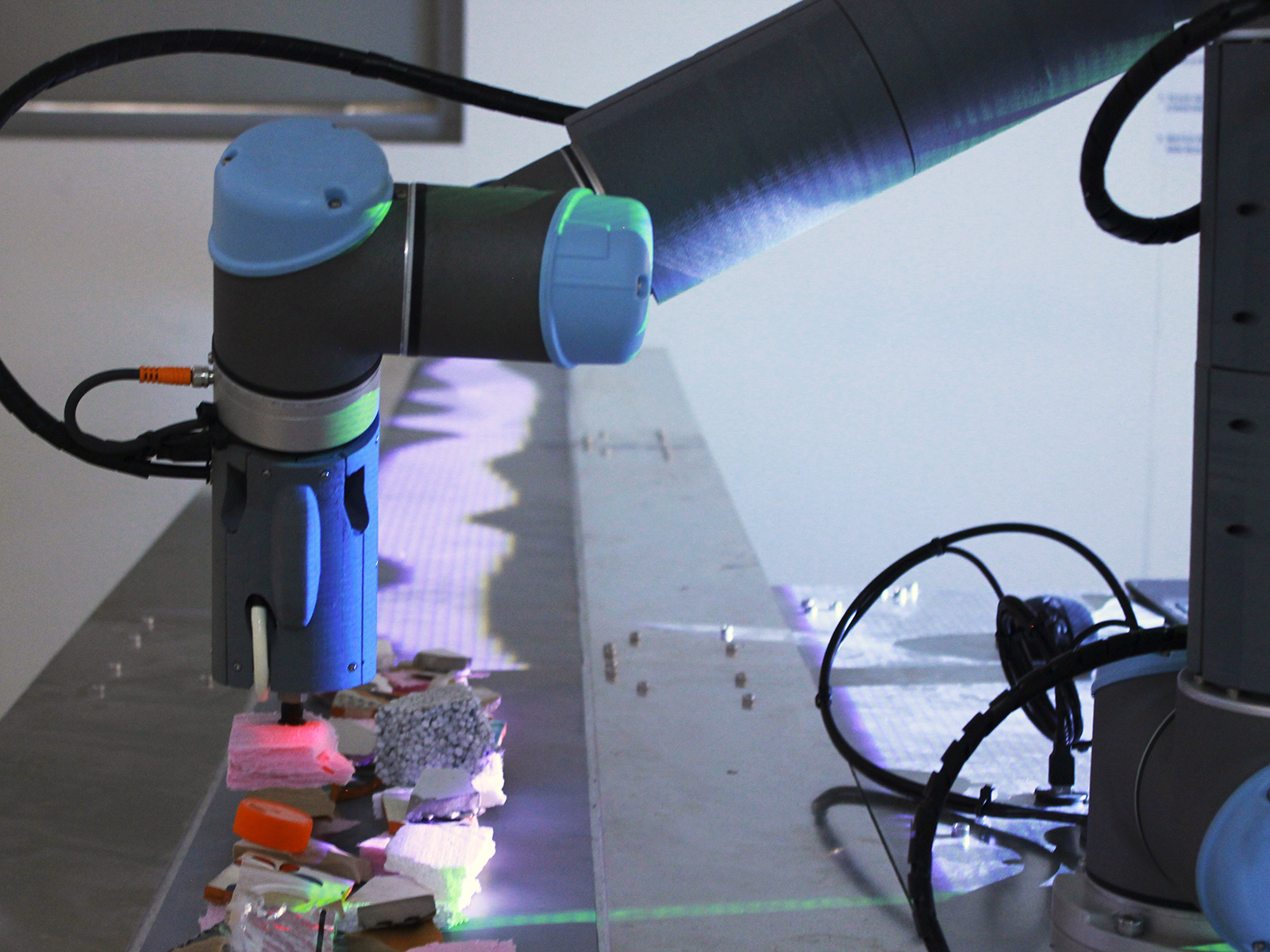
Grasping and Object Reorientation for Autonomous Construction of Stone Structures
Martin Wermelinger, Ryan Luke Johns, Fabio Gramazio, Matthias Kohler, Marco Hutter
IEEE Robotics and Automation Letters, 2021

Autonomous Dry Stone
Ryan Luke Johns, Martin Wermelinger, Ruben Mascaro, Dominic Jud, Fabio Gramazio, Matthias Kohler, Margarita Chli, Marco Hutter
Construction Robotics, 2020
Robo-Stim: Modes of Human Robot Collaboration for Design Exploration
Ryan Luke Johns, Jeffrey Anderson, Axel Kilian
Design Modelling Symposium, 2019
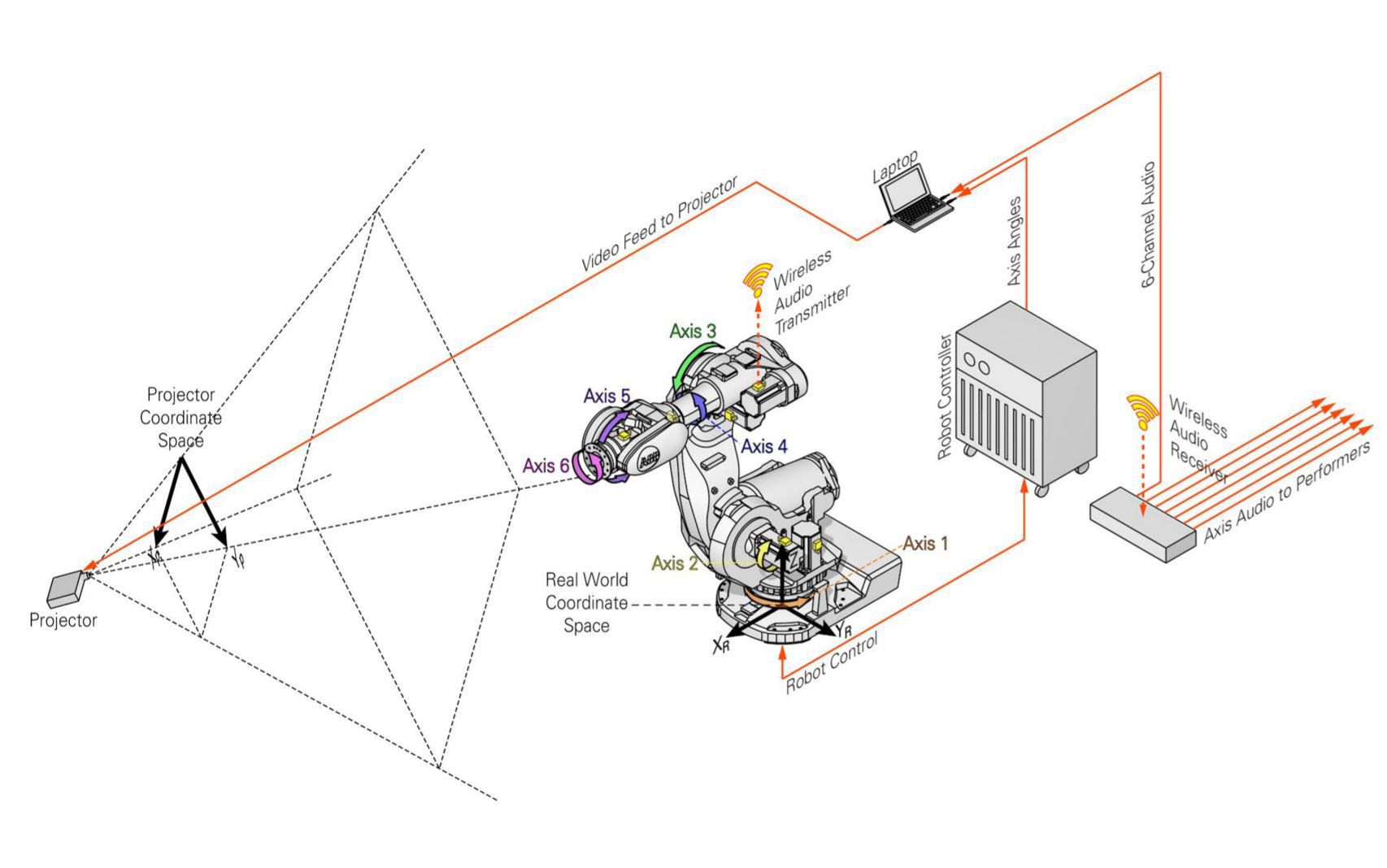
Machine Yearning: An Industrial Robotic Arm as a
Performance Instrument
Performance Instrument
Jeff Snyder, Ryan Luke Johns, Gene Kogan, Charlie Avis, Axel Kilian
NIME, 2015

Bandsawn Bands: Feature-Based Design and Fabrication of Nested Freeform Surfaces in Wood
Ryan Luke Johns, Nicholas Foley
Rob|Arch, 2014

Design Approaches Through Augmented Materiality and Embodied
Computation
Computation
Ryan Luke Johns, Axel Kilian, Nicholas Foley
Rob|Arch, 2014
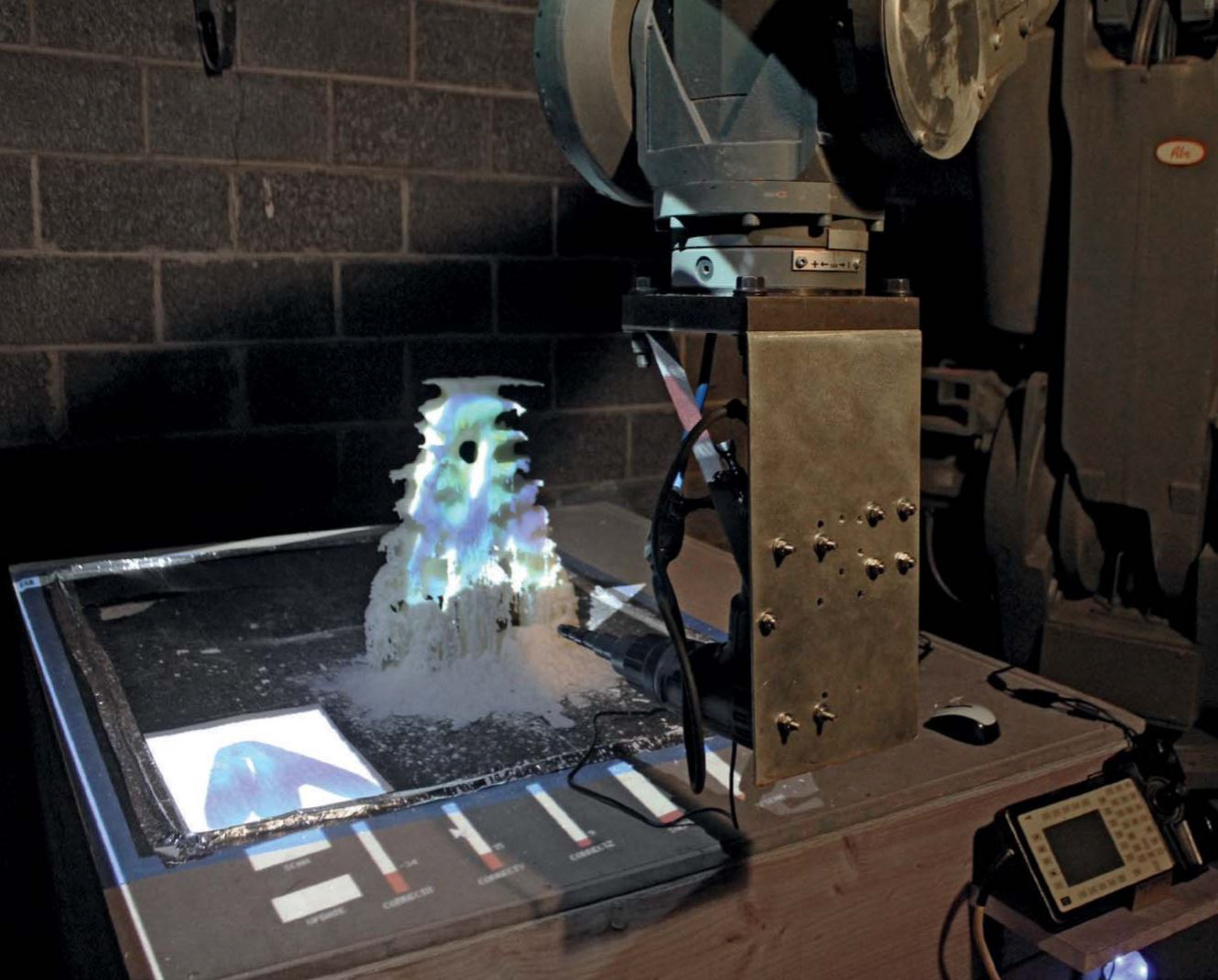


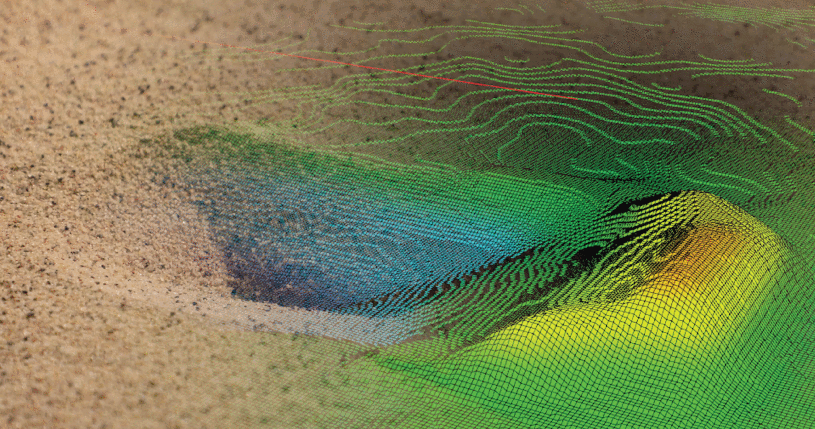
Deep Sandscapes: Design Tool for Robotic Sand-Shaping with GAN-Based Heightmap Predictions
Ko Tsuruta, Simon Joris Griffioen, Jesús Medina Ibáñez, Ryan Luke Johns
ANNSIM, 2022
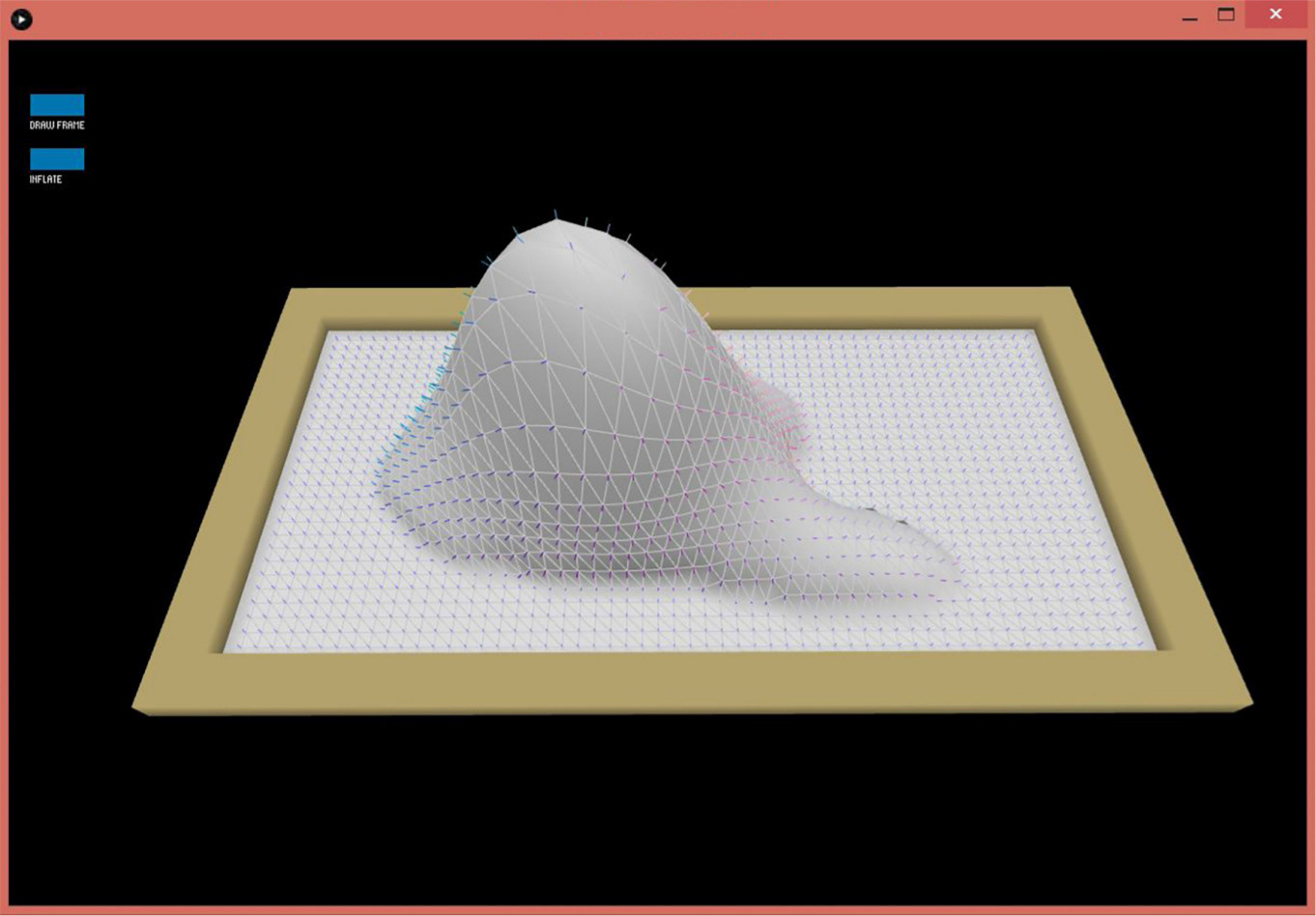
Airforming: Incremental Formwork-Free Molding of a Freeform Surface through the Application of Heat Under Variable Pressure
Kyle Schumann, Ryan Luke Johns
CAADRIA, 2019